
This collaborative research project will create a practical control scheme for large swarms of microrobots. These robots are typically no more than a few millimeters in length, and rely on an external power source and control signal. Currently, it is possible to steer the swarm as a whole to a single destination (or perhaps, to a desired average location). However, realizing the full potential benefits of microrobot swarms will require the ability to simultaneously send independent commands, either to individual robots or to small subgroups. Device designs have previously been explored that respond to different command amplitudes, however this approach quickly becomes impractical as the number of independently addressable robots grows. This scalability problem can be overcome using serial addressing schemes. Here, there are only a few distinct values for the control signal. Each independently addressable subset of robots is associated with a unique sequence of signal values, and will change its behavior only if the control signal contains that specific sequence. This project considers two fundamental issues that arise in implementing such a scheme. First is the need for on-board computation and memory allowing the robots to recognize the unique sequence and to change the robots state based on the detection of such sequence. Second is the need for a propulsive mechanism that couples to the robot state to allow differential guidance towards a target configuration. This project will advance two innovative engineering platforms that meet both needs. The first is electrostatically actuated, operates on a planar substrate, and is suitable for structured tasks such as microassembly. The second is magnetically actuated, operates in a liquid volume, and is suitable for biomedical applications such as drug delivery. The technical aspects of the project are complimented by outreach activities, including an annual microrobotics mobility competition to be held at the IEEE International Conference on Robotics and Automation -- a premier robotics conference for academia and industry. The results from this project will enhance the national health, by enabling new diagnostic and therapeutic uses for microrobot swarms. They will also promote the national prosperity, by enabling new classes of microassembly robots.
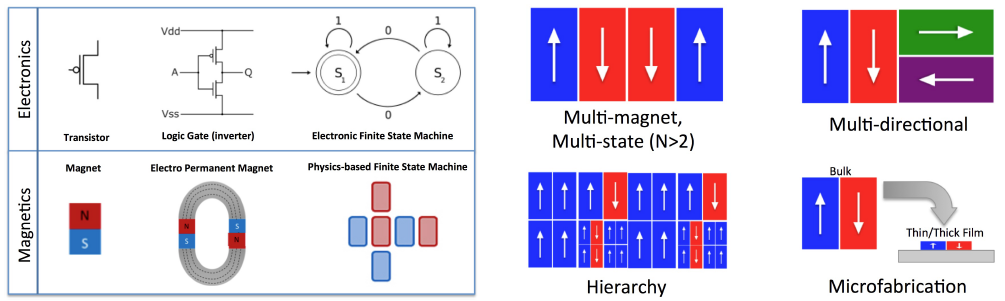
This project aims to develop a practical control scheme to simultaneously control large numbers of microrobots. This will be achieved by using microelectromechanical systems (MEMS) to electromechanically and magnetically decode a sequence embedded in the single global control signal, and couple the reconfiguration of such sequence to the modification of the individual microrobot trajectories. This on-board sequence decoding will be accomplished through sets of on-board physics-based finite state machines (PFSM) that can accept a control sequence embedded in the control signal and change the behavior of the microrobots accordingly. The project will use both electrostatic and magnetic approaches to implement PFSMs, and to couple their "accept" state to the propulsion mechanism to modulate individual trajectories. Sets of stress-engineered electrostatic switches, which will latch in response to a pre-programmed control voltage sequence, will be used to implement PFSM on the electrostatic platform. Electro-permanent magnetic circuits, which change their magnetic moment in response to a sequence of global magnetic field, will be used to implement PFSM on the magnetic platform. The project will develop the theory for PFSM-based multi-microrobot control, construct both electrostatic and magnetic microrobotic PFSM platforms, and validate the concept by implementing the PFSM-based control on swarms of electrostatically and magnetically powered microrobots. The developed theory and approach will pave way for control of large microrobot swarms for numerous biomedical and microassembly applications.